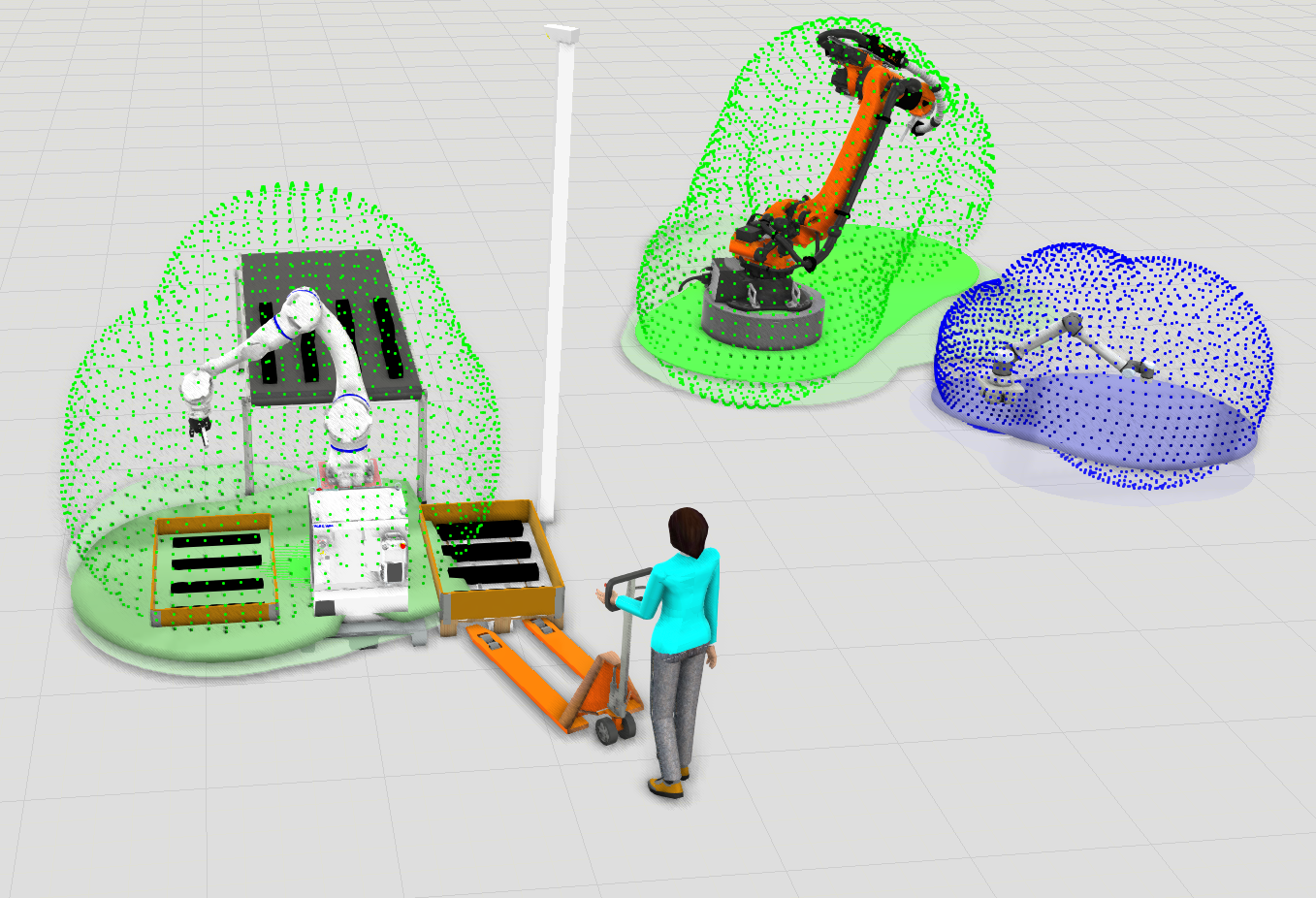
Bei Robotern, die für die MRK bestimmt sind (Cobots), gelten besonders hohe Anforderungen an die Sicherheit der Bewegungsabläufe: Das zentrale Sicherheitsmodul muss Daten aus zahlreichen Sensoren verarbeiten, was viele Kabelverbindungen für Sensoren und Aktoren in traditionellen Roboterarchitekturen und proprietären Lösungen erfordert. Die neue Sicherheitsarchitektur, die vom Fraunhofer IWU, der Synapticon GmbH und NexCOBOT entwickelt wurde, ist dezentral ausgelegt: Sie ermöglicht ein sicheres Miteinander von Mensch und Industrieroboter auch dann, wenn sich die Arbeitssituationen dynamisch verändern – bei deutlich reduziertem Verkabelungsaufwand. Lediglich Strom und Kommunikationsverbindungen müssen zu den Antrieben geführt werden. Ein weiterer Vorteil: Da die Sicherheit der Bewegungsabläufe direkt an der Antriebsachse überwacht wird, verstreicht deutlich weniger Reaktionszeit.
Weiterlesen: https://www.iwu.fraunhofer.de/de/presse-und-medien/presseinformationen/PM-2023-IWU-Modulare-Sicherheitsarchitektur-fuer-die-Mensch-Roboter-Kollaboration.html

Umwelt & Energie
EUDR: Trilog-Einigung zu Verschiebung und Erleichterungen sowie EUDR-Umfrage
Die EU-Institutionen haben sich im Trilog zur EUDR am 4.12. zügig geeinigt. Viele der Forderungen der DIHK sind in den Anpassungen enthalten. Die Trilog-Einigung muss noch formal vom Rat und vom Plenum des Europaparlaments (am 16.12.25) angenommen werden. Die DIHK bemüht sich nun, die 4-monatige Review-Phase Anfang 2026 so gut wie möglich zu nutzen. Neben Beispielen bringt die DIHK hierzu auch Umfrageergebnisse ein. An einer bundesweiten Umfrage mit dem Ziel, die Unternehmensperspektive zu Aufwand und Ressourcen zu sammeln und praxisnahe Herausforderungen sichtbar machen, können alle Interessenten gerne teilnehmen.